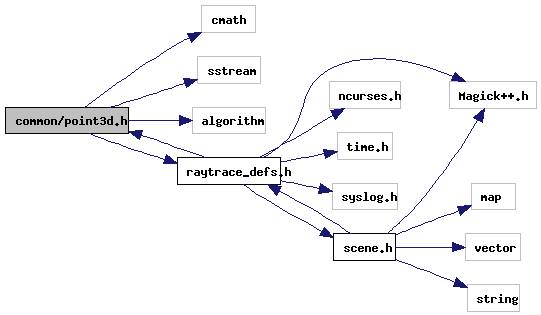
#include <cmath>#include <sstream>#include <algorithm>#include "raytrace_defs.h"Include dependency graph for point3d.h:
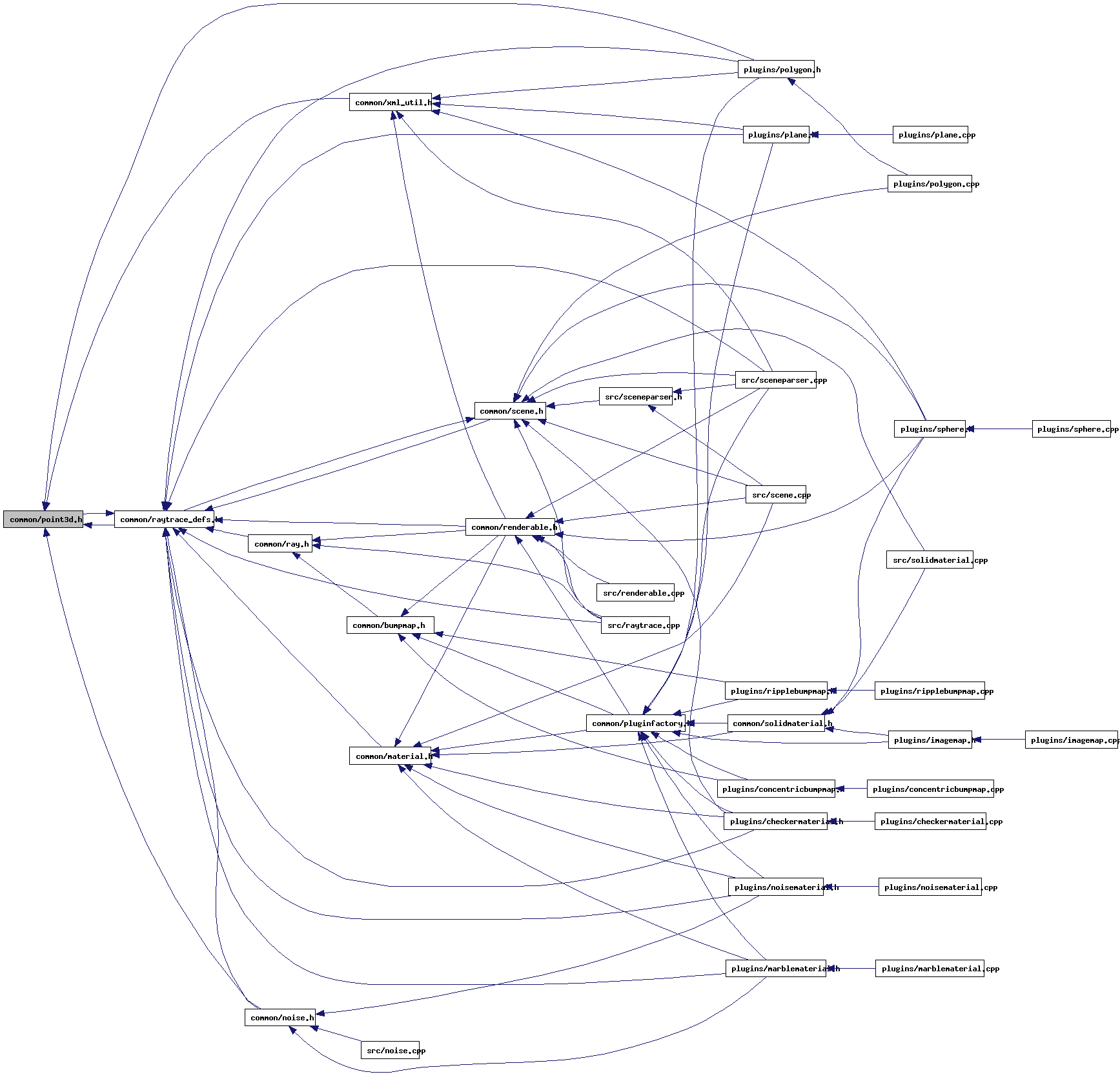
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | Point3D |
| A three-dimensional point in space. More... | |
Typedefs | |
| typedef Point3D | Vector |
Functions | |
| Vector | cross_product (const Vector &one, const Vector &two) |
| double | dot_product (const Vector &A, const Vector &B) |
| The dot product of two unit vectors provides the cosine of the angle between the two vectors. | |
| bool | iswhitespace (char c) |
| template<class _T> | |
| Vector | operator * (Vector &v, const _T n) |
| Vector | operator * (const Vector &A, double factor) |
| bool | operator!= (const Vector &A, const Vector &B) |
| Vector | operator+ (const Vector &A, const Vector &B) |
| Add the two vectors and return the new Vector. | |
| Vector | operator- (const Vector &A) |
| Unary negation. | |
| Vector | operator- (const Vector &A, const Vector &B) |
| bool | operator== (const Vector &A, const Vector &B) |
The cross product of two vectors is the normal vector to a plane defined by the two vectors
Definition at line 160 of file point3d.h.
References Point3D::x, Point3D::y, and Point3D::z.
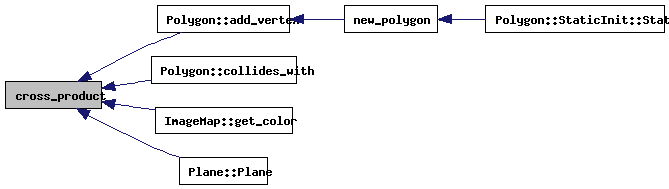
Referenced by Polygon::add_vertex(), Polygon::collides_with(), ImageMap::get_color(), and Plane::Plane().
Here is the caller graph for this function:
The dot product of two unit vectors provides the cosine of the angle between the two vectors.
Definition at line 151 of file point3d.h.
References Point3D::x, Point3D::y, and Point3D::z.
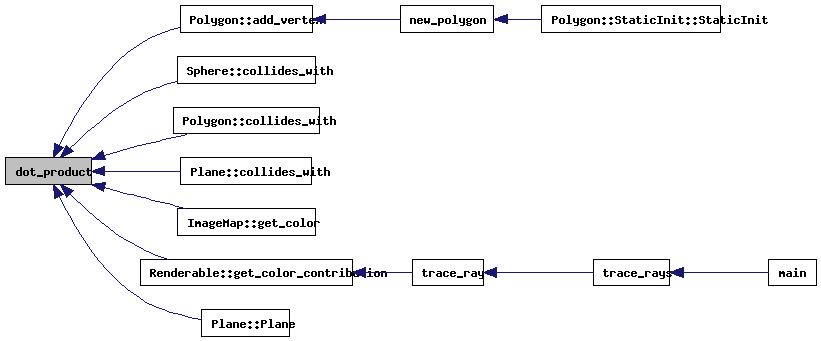
Referenced by Polygon::add_vertex(), Sphere::collides_with(), Polygon::collides_with(), Plane::collides_with(), ImageMap::get_color(), Renderable::get_color_contribution(), and Plane::Plane().
Here is the caller graph for this function:
| bool iswhitespace | ( | char | c | ) | [inline] |
Definition at line 12 of file point3d.h.
Referenced by Point3D::Point3D().
Here is the caller graph for this function:

Add the two vectors and return the new Vector.
Definition at line 128 of file point3d.h.
References Point3D::x, Point3D::y, and Point3D::z.
Unary negation.
Definition at line 121 of file point3d.h.
References Point3D::x, Point3D::y, and Point3D::z.
Subtract the two vectors and return the new Vector.
| A | First vector | |
| B | Second vector |
Definition at line 115 of file point3d.h.
References Point3D::x, Point3D::y, and Point3D::z.
 1.5.2
1.5.2